Коллекторный или бесколлекторный двигатель радиоуправляемой модели, выбираем электродвигатель машины на р/у или квадрокоптера
Содержание:
- Трехфазный коллекторный двигатель
- Коллекторные двигатели разной мощности
- Принцип работы бесколлекторного мотора
- Плюсы и минусы бесщеточного шуруповерта
- Другие сравнения
- Определение и устройство
- Преимущества и недостатки
- Сходства и различия интегральных схем для управления двигателем
- Коллекторный двигатель
- Возможные поломки и способы их ремонта
- Ротор коллекторного двигателя
- Как запустить бесколлекторный двигатель?
Трехфазный коллекторный двигатель
|
Устройство фазокомпенсатора.| Схема включения асинхронного двигателя с фазокомпенсатором. |
Трехфазные коллекторные двигатели применяются в электроприводах переменного тока при необходимости регулирования скорости вращения в широких пределах.
Трехфазные коллекторные двигатели являются коллекторными асинхронными машинами. Они работают при наличии в них вращающегося магнитного поля со скоростью, отличающейся в общем случае от скорости поля. На их роторе помещается обмотка, выполненная так же, как обмотка якоря машины постоянного тока.
Рассматриваемый трехфазный коллекторный двигатель применяется в текстильной промышленности ( для кольцевых прядильных станков), в резиновой промышленности ( для каландров), в полиграфической промышленности ( для ротационных машин), иногда для металлорежущих станков.
Соот-петственно различают однофазные и трехфазные коллекторные двигатели переменного тока. Ротор их выполняется так же, как якорь машины постоянного тока — с петлевой или волновой обмоткой, соединенной с коллектором. В статоре рассматриваемых машин имеет место переменное магнитное поле, поэтому он собирается из тонких листов электротехнической стали в отличие от статора машин постоянного тока, ярмо которого обычно выполняется из литой или прокатанной стали.
Существует два типа шунтовых трехфазных коллекторных двигателей: один с писанием через статор и другой-через ротор. Первая из этих машин выполняется обычно по схеме фиг.
По сравнению с другими трехфазными коллекторными двигателями двигатель с питанием со стороны ротора имеет наибольшее распространение. Он находит применение в нереверсивных приводах с широким и главным регулированием частоты вращения: в печатных машинах, в бумагоделательной промышленности, в текстильной и цементной промышленности.
По сравнению с другими трехфазными коллекторными двигателями двигатель с питанием со стороны ротора имеет наибольшее распространение. Он находит применение в нереверсивных приводах с широким и глаьным регулированием частоты вращения: в печатных машинах, в бумагоделательной промышленности, в текстильной и цементной промышленности.
|
Ограничение силы тока в коммутируемой секции посредством включения сопротивлений между обмоткой якоря и коллекторными пластинами. |
Условия коммутации в трехфазных коллекторных двигателях в основном так же неблагоприятны, как и в однофазных двигателях.
В 1910 г. появился регулируемый шунтовой трехфазный коллекторный двигатель, одновременно и независимо изобретенный К. Двигатель Шраге — Рихтера быстро завоевал себе широкое признание и в целом ряде случаев дал технически весьма ценное и совершенное решение.
|
Ограничение силы тока в коммутируемой секции посредством включения сопротивлений между обмоткой якоря и коллекторными пластинами. |
Наибольший практический интерес представляет собой трехфазный коллекторный двигатель параллельного возбуждения с питанием со стороны ротора — двигатель Шраге. Скорость этого двигателя можно плавно регулировать в широких пределах путем перемещения щеток, установленных на подвижных траверсах. Однако этот двигатель сложен по устройству и дорог. Он примерно в 2 5 — 3 раза дороже асинхронного двигателя той же мощности. Его применение оправдывает себя лишь в iex случаях, когда только к одному исполнительному механизму требуется двигатель с плавным регулированием скорости и потому нецелесообразно устройство преобразовательной установки для получения постоянного тока ввиду небольшой требующейся мощности.
При числе оборотов, большем двойного синхронного, трехфазный коллекторный двигатель может отдавать в сеть намагничивающий ток. Если якорь двигателя вращать внешней силой в направлении, обратном его вращению, то двигатель работает генератором независимо от направления вращения вращающегося поля.
При мощности выше 10 л. с. рекомендуется пользоваться трехфазными коллекторными двигателями, скорость которых можно изменять смещением щеток при помощи маленького дополнительного двигателя.
Коллекторные двигатели разной мощности
Коллекторные двигатели можно условно разделить на две подгруппы, с меньшими и с большими мощностными показателями. Маломощные модели отличаются наличием физического магнита, закрепленного на корпусе. Второй магнит при этом создается с помощью коллекторно-щеточного узла, когда на якорную обмотку подается напряжение.
Вращающий момент возникает в результате непрерывной смены полюсов якорного магнита (при прохождении якоря через «магнитную нейтраль»). Этот эффект достигается следующим образом:
- коллекторное кольцо посредством специальных пластин делится на сектора;
- к секторам последовательно подсоединяют концы обмоток якоря.
На более мощные движки физические магниты обычно не устанавливают, поскольку это сильно утяжеляло бы конструкцию. Чтобы создать постоянное магнитное поле, к шине питания (положительной или отрицательной) подключают стержни с обмотками, последовательным образом подсоединяя полюса одноименного типа.
Высокомощные коллекторные двигатели имеют некоторые конструктивные нюансы:
- количество установленных токосъемников (щеток) должно соответствовать количеству пар полюсов;
- в целях повышения эффективности работы мотора после запуска и смены нагрузки щеточный узел сдвигают на определенный угол относительно направления вращения.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов бесколлекторного типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.

Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Плюсы и минусы бесщеточного шуруповерта
Производители пишут, что основная изюминка бесщеточного шуруповерта — не нужно менять щетки, которых нет. Это на самом деле так, но так ли сложно поменять щетки?
За этим «жирным» плюсом притаился довольно коварный минус. Дело в том, что более-менее нагруженный шуруповерт потребует замены щеток на второй, а то и третий год работы. Проводя их замену, бережливый владелец наверняка заглянет и в другие узлы инструмента
Обратит внимание на состояние подшипников, очистит внутренности от пыли, заложит порцию свежей смазки — в общем, проведет полное техобслуживание инструмента. В случае с бесколлекторным инструментом, о необходимости сервисного обслуживания можно просто забыть и вспомнить о нем, когда шуруповерт начнет конкретно барахлить
Вот по-настоящему значимые преимущества бесщеточного инструмента:
Высокий КПД. У бесщеточного двигателя он составляет порядка 90 %, в то время как у коллекторного мотора — на уровне 60 %. Это обусловлено отсутствием потерь на трение и искрообразование, и, как следствие, повышением температуры коллекторного узла якоря мотора.
Быстрый выход на номинальную скорость вращения двигателя. В этом опять же заслуга высокого КПД BLDC мотора.
При тех же массогабаритных показателях, с вала бесщеточного электродвигателя снимается большая мощность, а это влечет получение большего крутящего момента.
Лучшая энергоэффективность. Благодаря отсутствию потерь в коллекторе и щеточном узле и более высокому КПД бесщеточный шуруповерт сделает больше полезной работы на одном заряде аккумулятора
Это важно профессионалам, для которых время — деньги. Эффективность бесщеточного шуруповерта в среднем выше на 25–40 % в сравнении с его коллекторным аналогом.
Возможность использования во взрыво- и пожароопасных средах ввиду отсутствия искр на щеточном узле.
Грамотная защита от перегрузки
Плата управления электродвигателем просто не позволит нагрузить инструмент сверх меры, а вот коллекторный шуруповерт при должном старании можно перегреть и получить дымок из вентиляционных отверстий.

Но бесщеточным инструментам присущи и некоторые недостатки:
- Высокая цена. Наличие в конструкции дорогой силовой платы управления BLDC мотором ощутимо увеличивает стоимость шуруповерта.
- Плохая ремонтопригодность. В бесщеточном шуруповерте плата управления, кнопка включения инструмента и статор электродвигателя обычно идут единым блоком. Стоимость запчасти — от 2/3 до 3/4 стоимости нового инструмента. Если поломка произойдет по истечении гарантийного срока, то ремонтировать такой шуруповерт вряд ли целесообразно. В отличие от коллекторных экземпляров, где можно заменить кнопку или электродвигатель отдельно, и стоить это будет на порядок дешевле.

Другие сравнения
При сопоставлении коллекторных и асинхронных двигателей одинаковой мощности, вне зависимости от номинальной частоты последних, получается разная характеристика. Далее это будет описано подробнее. Универсальный коллекторный электродвигатель реализует «мягкую» характеристику. В данном случае момент прямо пропорционален нагрузке на валу, при этом обороты обратно пропорциональны ей. Номинальный момент обычно меньше максимального в 3-5 раз. Ограничение оборотов холостого хода характеризуется исключительно потерями в двигателе, при этом при включении мощного агрегата без нагрузки он может разрушиться.
Характеристикой асинхронного двигателя является «вентиляторная», то есть агрегат поддерживает частоту вращения, приближенную к номинальной, увеличивая момент максимально резко при незначительном снижении оборотов. Если речь идет о значительном изменении этого показателя, то момент двигателя не только не растет, но и падает до нулевой отметки, что приводит к полной остановке. Обороты холостого хода немного превышают номинальные, при этом остаются постоянными. Характеристикой однофазного асинхронного двигателя является дополнительный набор проблем, сопряженных с запуском, так как он не развивает пускового момента в нормальных условиях. Магнитное поле однофазного статора, пульсирующее во времени, распадается на два поля с противоположными фазами, из-за чего пуск без всевозможных ухищрений становится невозможным:
— емкость, создающая искусственную фазу;
— расщепленный паз;
— активное сопротивление, формирующее искусственную фазу.
Теоретически поле, вращающееся в противофазе, снижает максимальный КПД однофазного асинхронного агрегата до 50-60% из-за потерь в перенасыщенной магнитной системе и обмотках, нагружаемых токами противополя. Получается, что на одном валу находятся две электрические машины, при этом одна работает в двигательном режиме, а вторая – режиме противовключения. Получается, что электродвигатели однофазные коллекторные не знают конкурентов в соответствующих сетях. Чем и заслужили столь высокую популярность.
Механические характеристики электродвигателя обеспечивает ему определенную сферу использования. Малые обороты, ограниченные частотой сети переменного тока, делают асинхронные агрегаты аналогичной мощности большими по весу и размеру в сравнении с универсальными коллекторными. Однако при включении в цепь питания инвертора с высокой частотой можно добиться соизмеримых размеров и веса. Остается жесткость механической характеристики электродвигателя, к которой добавляются потери на токопреобразование, а также увеличение частоты, повышаются магнитные и индуктивные потери.

Определение и устройство
В справочниках и энциклопедиях приводят, такое определение:
«Коллекторным называется электродвигатель, у которого датчиком положения вала и переключателем обмоток является одно и то же устройство – коллектор. Такие двигатели могут работать либо только на постоянном токе, либо и на постоянном, и на переменном.»
Коллекторный электродвигатель, как и любой другой, состоит из ротора и статора. В этом случае ротор – является якорем. Напомним, что якорем называется та часть электрической машины, которая потребляет основной ток, и в которой индуцируется электродвижущая сила.
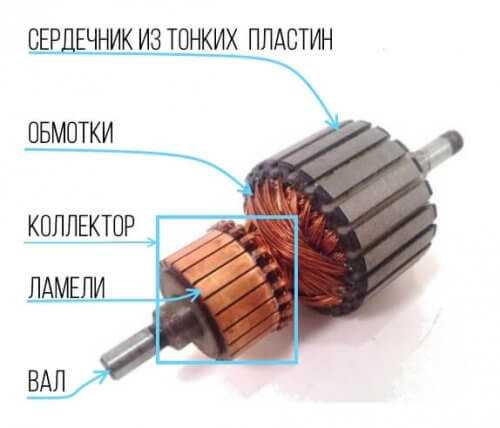
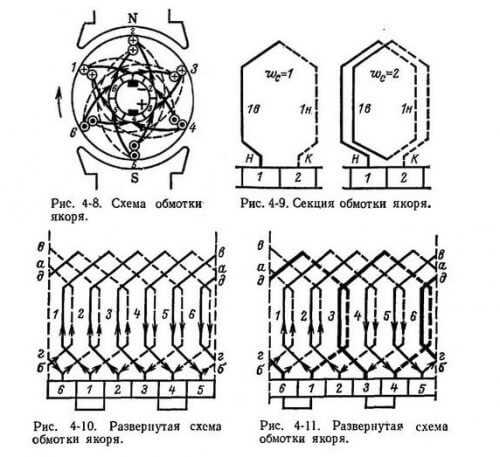
Для чего нужен и как устроен коллектор? Коллектор расположен на валу (роторе), и представляет собой набор продольно расположенных пластин, изолированных от вала и друг от друга. Их называют ламелями. К ламелям подключаются отводы секций обмоток якоря (устройство якорной обмотки КДПТ вы видите на группе рисунков ниже), а точнее к каждой из них подключен конец предыдущей и начало следующей секции обмотки.
Ток к обмоткам подаётся через щетки. Щётки образуют скользящий контакт и во время вращения вала соприкасаются то с одной, то с другой ламелью. Таким образом происходит переключение обмоток якоря, для этого и нужен коллектор.
Щеточный узел состоит из кронштейна с щеткодержателями, непосредственно в них и устанавливаются графитовые или металлографитовые щетки. Для обеспечения хорошего контакта щетки прижимаются к коллектору пружинами.
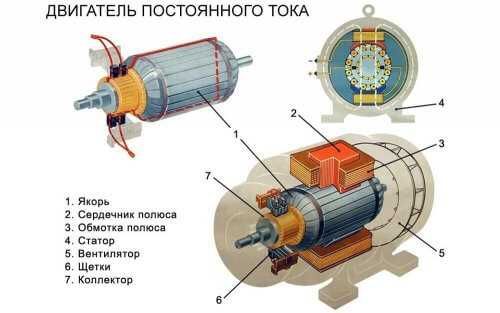
На статоре устанавливаются постоянные магниты или электромагниты (обмотка возбуждения), которые создают магнитное поле статора. В литературе по электрическим машинам вместо слова «статор» чаще используют термины «магнитная система» или «индуктор». На рисунке ниже изображена конструкция ДПТ в разных проекциях. Теперь же давайте разберемся как работает коллекторный двигатель постоянного тока!
Преимущества и недостатки
Основной принцип работы торсионной подвески. Принцип работы торсионной подвески Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Немного из истории:
Главная проблема всех двигателей — это перегревание. Ротор вращался внутри какого-нибудь статора, и поэтому тепло от перегрева никуда не уходило. Людям пришла в голову гениальная идея: вращать не ротор, а статор, который при вращении охлаждался бы воздухом. Когда создали такой двигатель, он стал широко использоваться в авиации и судостроении, и поэтому его прозвали Вентильным двигателем.

Вскоре был создан электрический аналог вентильного двигателя. Назвали его бесколлекторным мотором, потому что у него не было коллекторов (щеток).

Бесколлекторный двигатель.
Бесколлекторные (brushless англ.) электродвигатели пришли к нам сравнительно недавно, в последние 10-15 лет
. В отличие от коллекторных моторов они питаются трехфазным переменным током. Бесколлекторные двигатели эффективно работают в более широком диапазоне оборотов и имеют болеевысокий КПД . Конструкция двигателя при этом относительно проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Можно сказать, что бесколлекторные моторы практически не изнашиваются. Стоимость бесколлекторных двигателей несколько выше, чем коллекторных. Это вызвано тем, что все бесколлекторные моторы снабжены подшипникам и, как правило, изготовлены более качественно.
Испытания показали:
Тяга с винтом 8х6 =754 грамма ,Частота вращения =11550 об/мин ,Потребляемая мощность =9 ватт (без винта), 101 ватт (с винтом),

Мощность и КПД
Мощность можно вычислить вот таким способом:1) Мощность в механике вычисляется по такой формуле: N= F*v
, где F — сила, а v — скорость. Но так как, винт находится в статическом состояние, то движения нет, кроме вращательного. Если этот мотор установить на авиамодель, то можно было бы замерить скорость (она равна 12 м/с) и посчитать полезную мощность:N полез= 7.54*12= 90.48 ватт 2) КПД электрического двигателя находится по такой формуле:КПД= N полезной/N затраченной *100% , гдеN затрат= 101 ваттКПД= 90.48/101 *100%= 90% В среднем КПД бесколлекторных двигателей реально и колеблется около 90% (самый большой КПД достигнутый данным видом моторов равен99.68% )
Характеристики двигателя:
Напряжение: 11.1 вольт
Обороты:11550 об/мин Максимальная сила тока:15А Мощность:200 ватт Тяга:754 грамм (винт 8х6)

Заключение:
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Сходства и различия интегральных схем для управления двигателем
Преимущество маломощных двигателей, помимо их скромных потребностей в токе и напряжении, заключается в том, что драйверы затвора MOSFET могут быть интегрированы с контроллерами и оптимизированы для конкретных потребностей. Рассмотрим трио соответствующих предложений от STMicroelectronics. Эти три микросхемы от ST имеют множество базовых характеристик, которые позволяют применять их совместно с различными типами двигателей. Помимо этого, они облегчают моделирование и просты в изучении.
Вот несколько преимуществ, которыми обладают эти изделия:
- максимальная интеграция с использованием интерфейса микроконтроллера (MCU), логики управления, драйвера и моста МОП-транзистора (требуется только несколько пассивных компонентов и нет необходимости во внешних активных компонентах);
- малое рабочее напряжение 1,8…10 В, которое хорошо подходит для низковольтных двигателей, в особенности – для работающих от небольших аккумуляторных батарей;
- высокий выходной ток до 1,3 A (RMS) и 2 A (пиковое значение) для каждого выхода;
- энергопотребление в режиме ожидания до 80 нA;
- повышенная надежность благодаря блокировке при падении напряжения (UVLO), тепловой защите и защите от перегрузки по току;
- небольшой QFN-корпус размером 3×3 мм.
Рассмотрим сходства и различия трех данных микросхем для управления двигателем. STSPIN220, предназначенная для шаговых двигателей, объединяет в себе логику управления, высокую эффективность и малое сопротивление «сток-исток» открытого канала RDS(ON) (рисунок 5). Контроллер реализует управление токовым режимом с помощью широтно-импульсной модуляции (PWM) с программируемым временем выключения. STSPIN220 поддерживает разрешение 256 микрошагов на один полный шаг, что позволяет сделать движение максимально плавным.

Рис. 5. Микросхема STSPIN220 для управления шаговым двигателем
Микросхемы, аналогичные модели STSPIN220:
- STSPIN230 – монолитный драйвер для трехфазных двигателей BLDC;
- STSPIN240 – монолитный драйвер для двух независимых двигателей постоянного тока;
- STSPIN250 – монолитный драйвер для одного двигателя постоянного тока.
Примечание: драйвер STSPIN250 предназначен для одного двигателя в отличие от двухмоторного драйвера STSPIN240. STSPIN250 может обеспечивать более высокий ток 2,6 А (среднеквадратичное значение) и 4 А (пиковое значение).
Все эти интегральные схемы имеют максимально схожий внешний интерфейс и оперативные команды, функционально отличаются лишь их интерфейсы со стороны двигателя.
Коллекторный двигатель
Коллекторные двигатели бывают трехфазные и однофазные. Однофазные двигатели применяются в электрической тяге и для приводов малых и средних мощностей.
|
Габаритные размеры двигателя типа ДР-25. |
Коллекторные двигатели изготовляются в защищенном исполнении во избежание случайных прикосновений к вращающимся и токоведущим частям и попадания внутрь машины посторонних предметов и капель воды, падающих отвесно.
Коллекторные двигатели могут быть постоянного, переменного тока и универсальными, способными работать как от сетей постоянного, так и от сетей переменного тока. Коллекторные двигатели-постоянного тока выпускаются либо с параллельным ( независимым) возбуждением, либо с последовательным возбуждением, либо с постоянными магнитами.
Коллекторные двигатели с последовательным возбуждением имеют небольшой сдвиг фаз между током в якоре и магнитным потоком индуктора и применяются для включения в сеть переменного тока.
Коллекторные двигатели могут быть построены как для однофазного, так и для трехфазного тока и раз — деляются по роду своих характеристик на две основные группы: 1) двигатели последовательные, которые резко изменяют свою скорость с изменением нагрузки и дают высокую скорость при малых значениях тормозного момента на валу, развивая в то же время большой начальный вращающий момент при относительно малом потреблении тока; 2) двигатели шунтовые, скорость которых меняется при изменении нагрузки весьма мало благодаря тому, что магнитный поток их, определяясь током ответвленной возбуждающей цепи, меняется при нагрузке незначительно. Скорость этих двигателей может быть изменяема вверх или — вниз от синхронной в широких пределах. Нек-рые — из них допускают вполне плавное изменение-скорости, другие-лишь ступенями.
|
Векторная диаграмма однофазного коллекторного двигателя.| Коллекторный двигатель с компенсационной обмоткой и добавочными полюсами.| Репульсионный двигатель о v / о.| Связь направления вращения репульсионного двигателя с положением щеток.| Репульсионный двигатель с двойным комплектом щеток. |
Мощные коллекторные двигатели мощностью до 1500 кВт применяются в качестве тяговых в ряде западноевропейских стран.
Коллекторные двигатели компрессоров и вентиляторов имеют последовательное возбуждение, а преобразователи и делители напряжения, которые могут работать без нагрузки, обычно выполняют со смешанным возбуждением. Обмотки параллельного или независимого возбуждения этих машин создают магнитный поток, достаточный для ограничения их частоты вращения в допустимых пределах при работе без нагрузки. Генераторы преобразователей постоянного тока обычно имеют смешанное возбуждение. Большую магнитодвижущую силу у них создает обмотка независимого возбуждения. Генераторы служебного тока выполняют с параллельным регулируемым возбуждением.
|
Компенсированный коллекторный двигатель с питанием со стороны ротора.| Однофазный коллекторный двигатель последовательного возбуждения.| Электромагнитный момент в коллекторных двигателях. |
Однофазные последовательные коллекторные двигатели ( рис. 6.9) имеют сосредоточенную обмотку возбуждения 0В, расположенную на явновыраженных полюсах и соединенную последовательно с многофазной обмоткой якоря Я, секции которой присоединены к коллектору. Для снижения потерь в стали статор и ротор выполняются шихтованными. Конструкция однофазных коллекторных двигателей сходна с конструкцией двигателей постоянного тока последовательного возбуждения.
|
Габаритные размеры двигателей типов МУН-1, МУН-2 и МУН-1 С, МУН-2С. |
Коллекторные двигатели серии МУН предназначены для привода различных механизмов промышленного применения.
Коллекторный двигатель однофазного тока частотой 5Q гц состоит из статора, якоря, щеточного устройства и подшипниковых щитов.
Коллекторные двигатели малой мощности выпускаются в массовых количествах, поэтому для изолировки пазов и обмотки якорей разработано много типов полуавтоматических станков. Таким образом ручные обмотки механизированы в большей степени, чем катушечные обмотки машин средней мощности. Поэтому название обмоток скорее определяет порядок укладки проводов в пазы, чем технологию выполнения.
Возможные поломки и способы их ремонта
В результате работы коллекторного двигателя могут возникнуть неисправности. Большинство из них самостоятельно сможет устранить человек не имеющий специализированных технических знаний и оборудования. Ниже представлены наиболее часто возникающие неисправности.
Повышенный шум при работе узла. Сильный уровень шума при работе мотора может свидетельствовать о выходе из строя подшипников, на которые установлен якорь.

При выходе из строя подшипников качения необходимо заменить изношенные детали новыми.
Износ щёток. Критическая изношенность щёток сопровождается повышенным уровнем шума при работе. Несвоевременная замена может привести к поломке коллектора. При возникновении неисправности необходимо заменить графитовые щётки
При выборе щёток необходимо обратить внимание на их толщину. Новые детали не должны застревать в держателях
Отсутствие вращения якоря при подключении мотора к сети питания. Отсутствие вращения может возникнуть в результате обрыва цепи питания. Обрыв может произойти в результате поломки пружины прижимающей щётку к коллектору или при обрыве провода. При поломке пружины необходимо заменить ее новой деталью. При обрыве провода необходимо восстановить его целостность.
Отсутствие вращения ротора может возникнуть в результате выхода из строя предохранителя. Для восстановления работоспособности необходимо установить новый предохранитель. Перед установкой предохранителя необходимо определить причину, по которой старое устройство вышло из строя. После устранения причины можно установить предохранитель и провести испытание двигателя.
Отсутствие регулировки вращения вала якоря. После запуска агрегат работает на максимальных оборотах. Такая неисправность возникает в результате поломки реостата. Для восстановления работоспособности двигателя необходимо заменить регулятор.
Медленное вращение ротора. Снижение частоты вращения вала может возникнуть в результате низкого напряжения в сети питания. Необходимо проверить напряжение. Снижение оборотов якоря может быть спровоцировано высокой нагрузкой. Необходимо снизить нагрузку на якорь.
Из вышеперечисленного следует, что коллекторный мотор преобразовывает электрическую энергию в физическую силу. Для передачи напряжения к обмоткам якоря используются щётки. Моторы отличаются простотой конструкции и небольшими габаритно массовыми параметрами.
Ротор коллекторного двигателя
Ротор коллекторного двигателя состоит из вала, на который насаживается сборный магнитопровод. С одной стороны, на вал крепится коллекторный узел, с другой, лопасти вентилятора. Для обеспечения лёгкого вращения и для фиксации в корпусе на вал с двух сторон надеваются подшипники. Для нормальной работы электродвигателя, необходимо чтобы ротор был отлично сбалансирован. Потому к изготовлению этой части подходят особенно скрупулёзно.

Подвижная (вращающаяся) часть
Роторная обмотка
Сердечник ротора собирается из металлических пластин, отштампованных из магнитного металла. Толщина пластин 0,35-0,5 мм, каждая из них залита слоем диэлектрического лака, для избавления от паразитных токов. Пластины по внешнему краю имеют пазы, в которые затем укладываются витки медной проволоки. Эти пластины насаживаются на вал и закрепляются на нём, собирается пакет требуемого размера. Эта система является магнитопроводом.

Так выглядит ротор коллекторного двигателя
В пазы магнитопровода укладывается витки медного обмоточного провода. Выходы обмоток выводятся на коллекторный узел, где и происходит их переключение.
Как устроен коллекторный узел и как он работает
Коллекторный узел стоит рассмотреть подробнее. Иначе понять, как вращается ротор, сложно. Коллектор имеет цилиндрическую форму и набран из медных пластин (иногда называют ламелями), которые изолированы друг от друга слюдяными или текстолитовыми прокладками. Нет электрического контакта и с осью вала, к которому он крепится.

Коллектор имеет вид цилиндра, который набран из медных пластин. Пластины сделаны в виде секторов, разделены диэлектрическими прокладками
Получается, коллектор собран из медных секторов и без обмотки электрически друг с другом не связанных. К каждой пластине коллектора крепится вывод одной рамки обмотки ротора. К плоскости двух противоположных рамок коллектора прижимается две щетки. Они плотно прилегают к поверхности медной пластины коллектора, что даёт хороший контакт. На эти щётки подаётся потенциал, который и передаётся в тот виток обмотки ротора, который подключён к этим пластинам.

К парным пластинам коллектора прижимаются графитовые щетки
Так как ротор с некоторой скоростью вращается, одна пара пластин сменяется другой. Таким образом, напряжение передаётся на все обмотки ротора. При этом возникающие друг за другом поля поддерживают вращение ротора, «проталкивая» его в нужном направлении.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
Максимальная величина штатного напряжения для продолжительной работы.
Сопротивление внутренних цепей контроллера.
Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне)
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество
Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД