Progcont.ru
Содержание:
- CAN шина, как подключается автосигнализация к цифровой шине
- Можно ли сделать анализатор своими руками?
- Функциональность системы
- Что такое CAN-шина
- Принцип работы
- Инструкция по подключению сигнализации по CAN-шине
- Виды CAN-шин
- Принцип работы
- Визуальное программирование
- Работа с терминалом
- Классификация шинных систем автомобиля
- Передача сигналов
- Обзор возможностей протокола CAN
CAN шина, как подключается автосигнализация к цифровой шине
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно. Устал платить за штрафы? Выход есть!
- Абсолютно легально (статья 12.2);
- Скрывает от фото-видеофиксации;
- Подходит для всех автомобилей;
- Работает через разъем прикуривателя;
- Не вызывает помех в радиоприемнике и сотовых телефонах.
Узнать подробности
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
Общая схема для сборки анализаторного устройства
Плата, использующаяся в качестве основы
Функциональность системы
Чтобы понять, что такое CAN-шина, следует разобраться в ее функциональном назначении.
Она призвана передавать фреймы в реальном времени, которые содержат информацию о значении (например, перемена скорости) или о возникновении события от одного узла-передатчика к приемникам программы.
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Принцип работы
Принцип работы, по которому работает анализатор шины CAN, заключается в том, что ему необходимо быстро обработать полученную информацию и вернуть ее в виде сигнала для конкретной системы. В каждом отдельном случае скорость передачи данных для систем автомобиля разная.

Параметры скорости
Основные скоростные параметры выглядят так:
- суммарная скорость передачи потоков данных по цифровой шине – 1 Мбит/с;
- скорость передачи обрабатываемой информации между блоками управления автомобиля — 500 кб/с;
- скорость, с которой система «Комфорт» получает информацию, составляет 100 кбит/с.
Особенности передачи данных
Если автосигнализация подключена к цифровой шине, информация будет поступать максимально быстро, а команды, подаваемые человеком с помощью брелока, будут выполняться точно и вовремя. Системный анализатор работает без перебоев и поэтому работа всех систем машины всегда будет в исправном состоянии.
С появлением CAN-шины и началом ее использования схема автомобильной электропроводки освободилась от определенного количества проводников, обеспечивавших связь контроллера управления между диагностическим разъемом, двигателем, мультимедиа (системы навигации с операционной системой Android) , автомобильная система защиты и т д., используя протокол KWP 2000.
Цифровая шина представляет собой полную сеть контроллеров, которые объединены в компактное устройство и могут быстро получать или передавать информацию, запускать или выключать определенные системы. Последовательный режим передачи данных делает работу системы более плавной и корректной. Шина CAN является механизмом, который имеет тип доступа Collision Resolution и этот факт необходимо учитывать при установке дополнительного оборудования.

Обычно проводка CAN-шины оранжевого цвета, и они отличаются друг от друга полосами разного цвета (CAN-High — черная, CAN-Low — оранжево-серая).
При обмене информацией между любым блоком управления и с помощью приемопередатчика сигналы приема и передачи информации усиливаются до необходимого уровня.

Каждый блок, подключенный к CAN-шине, имеет определенное входное сопротивление, вследствие чего формируется нагрузка CAN-модуля.
Нагрузка на центральную CAN-шину зависит от одновременного подключения и использования исполнительных механизмов и электронных блоков управления автомобиля и различных датчиков, например, сопротивление силового агрегата, подключенного к CAN-шине, составляет в среднем 68 Ом, информационно-командное Системы «КОМФОРТ-пакет» от 2,0 до 3,5 кОм. В момент деактивации всей системы деактивируется и нагрузочное сопротивление модулей, работающих через CAN-шину.

Распределение нагрузки по проводам
Блоки управления автомобильными системами помимо различных нагрузочных резисторов имеют еще и скорость передачи данных, что может быть препятствием при обработке импульсов разной природы.
Для решения технической проблемы разнородных импульсов для связи между шинами используется шлюзовой преобразователь.
Преобразователь — это так называемый межсетевой интерфейс, в автомобиле используется в блоке управления или как самостоятельный блок и т.д. Интерфейс преобразователя используется для ввода/вывода различной информации из диагностического разъема OBD, который подводится к диагностическому разъему через определенный кабель и соединяет центральный блок управления с разъемом OBD по шине CAN.

OBD — это универсальный диагностический разъем с множеством удобств и преимуществ для сканирования автомобиля на ошибки и диагностики.

Как показано на изображении, электронные блоки CAN-шины общаются в автомобиле через разные блоки, но блок питания CAN-шины, информационно-командная система и система Комфорт делают одно и то же, в зависимости от марки автомобиля и в своем составе, единицы могут различаться, но суть идеи остается неизменной.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Виды CAN-шин
Условно CAN-шины можно разделить между собой на два типа в соответствии с использующимися идентификаторами:
- КАН2, 0А. Так маркируются цифровые устройства, которые могут функционировать в 11-битном формате обмена данными. Этот тип интерфейсов по определению не может выявить ошибки на сигналы от модулей, работающих с 29 бит.
- КАН2, 0В. Так маркируются цифровые интерфейсы, функционирующие в 11-битном формате. Но ключевая особенность состоит в том, что данные об ошибках будут передаваться на микропроцессорные устройства, если обнаруживается идентификатор на 29 бит.
CAN-шины могут делиться на три категории в соответствии с видом:
- Для силового агрегата автомобиля. Если подключить к нему такой тип интерфейса, это позволит обеспечить быструю связь между управляющими системами по дополнительному каналу. Предназначение шины заключается в синхронизации работы ЭБУ двигателя с другими узлами. Например, коробкой передач, антиблокировочной системой и т. д.
- Устройства типа Комфорт. Такая разновидность цифровых интерфейсов используется для соединения всех систем данной категории. К примеру, электронной регулировки зеркал, подогрева сидений и т. д.
- Информационно-командные интерфейсы. Имеют аналогичную скорость передачи информации. Используются для обеспечения качественной связи между узлами, необходимыми для обслуживания транспортного средства. К примеру, между электронным блоком управления и навигационной системой или смартфоном.
О принципе действия, а также о разновидностях цифровых интерфейсов рассказал канал «Электротехника и электроника для программистов».
Принцип работы
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN

 Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
 Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN


Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
- Спящий режим В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
- ПробуждениеКогда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
- Активный режимВ активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
- ЗасыпаниеВ момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Визуальное программирование

Развитая поддержка шины CAN это не единственная особенность этих контроллеров, кроме этого CANNY имеют свою собственную среду программирования, CannyLab, но не «обычную», а визуальную, где весь процесс написания программ сводится к манипулированию готовыми структурными блоками, заданию их параметров и соединению входов и выходов этих блоков в определённой последовательности, в соответствии с алгоритмом решаемой задачи.
Ни одной строчки кода!
Хорошо это или плохо? На мой взгляд, это дело привычки. Мне, как человеку привыкшему к «традиционному» программированию, было непривычно манипулировать блоками, вместо написания строк кода. С другой стороны, существует множество приверженцев именно такого подхода к составлению алгоритмов и считается, что для инженеров и «не программистов» это наиболее простой и доступный метод программирования микроконтроллеров.
Мне, как минимум, было «прикольно» составлять программы таким образом и через некоторое время мне это стало даже нравиться. Возможно, что если продолжить этим заниматься, то через некоторое время уже написание кода покажется неудобным.
CannyLab является бесплатной средой разработки и вы можете свободно скачать её с сайта разработчиков, она также не требует специальной процедуры инсталляции — достаточно распаковать файл с архивом — и вы можете начинать работу.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса
Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
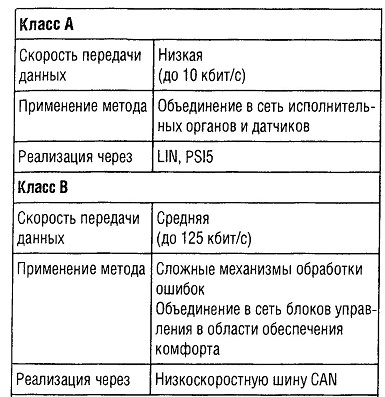
Классификация шинных систем автомобиля
 |
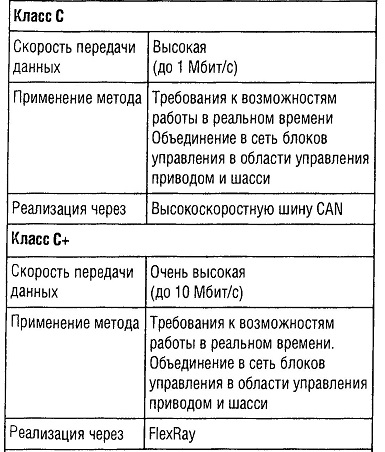 |
Шина CAN была признана стандартом с момента своего появления в серийно выпускаемых автомобилях в 1991 году. Но она также часто используется и в автоматизации. Основные особенности:
- Передача сообщений с ранжированием приоритетов и неразрушающим арбитражем;
- Снижение затрат благодаря использованию недорогой витой пары и простого протокола с невысокими требованиями к вычислительной мощности;
- Скорость передачи данных до 1 Тбит/с у высокоскоростной шины CAN и до 125 Кбит/с у низкоскоростной шины CAN (более низкие расходы на аппаратную часть);
- Высокая надежность передачи данных за счет распознавания и сигнализации спорадических и постоянных неисправностей и благодаря унифицированию сетевых процессов через acknowledge;
- Принцип много абонентской шины;
- Высокая степень готовности за счет обнаружения неисправных станций;
- Стандартизация по ISO 11898.
Передача сигналов
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.

Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
Обзор возможностей протокола CAN
- Продукция — микросхема, средства разработки, модули, средства проектирования;
- Рассылка сообщений: у каждого участника будет возможность выбрать просмотр сообщений, которые касаются только его. Для этого предусмотрены фильтры;
- Характер передачи — если участник выбрал не только свои сообщения, то у него есть возможность увидеть весь поток информации;
- Контентная адресация: явного адресата нет. Адреса содержимого выбираются по идентификатору в самом сообщении;

- Типы сообщений: кадр данных, удаление, ошибки, перезагрузка;
- Стандартный CAN и его расширенная версия отличаются длиной устанавливаемого идентификатора. Если в стандартном варианте он равен 11 битам, то в «толстом» аналоге он равен 29 битам;
- Разрешение конфликтов и приоритизация: Во избежание одновременной передачи данных несколькими участниками разработан арбитражный механизм. Все стаи делятся на доминантные и рецессивные. Не вдаваясь в подробности, укажем лишь, что приоритет всегда на стороне доминирующего сообщения.
Физические уровни:

— Сбалансированная двухпроводная схема высокоскоростного сигнала CAN представляет собой вторую часть стандарта ISO 11898;
— третья часть стандарта ISO 11898 представляет собой следующий уровень предыдущей схемы;
— однопроводный уровень, описанный стандартом SAE J2411. Шины такого уровня устанавливаются, например, на автомобили General Motors.
- Концевое прерывание: шина CAN должна иметь резистор (120 Ом) на конце, чтобы ослабить отражение сигнала и создать уровень постоянного тока.
- Кабель: сопротивление должно быть в пределах 108 — 132 Ом.
При нескольких сбоях передач дается возможность последующей эксплуатации. Неисправности могут быть разного характера: обрыв, короткое замыкание в разных частях, отключение с оконечным сопротивлением.
Разъем: Стандартов для разъемов CAN не существует. Каждый протокол описывает свои предпочтения. Тем не менее, существует стандарт де-факто для автомобильной промышленности.
- Ошибка: Драйвер найдет и пометит, уничтожив поток. Эти флаги станут для всех участников цепочки сигналом к ее сбросу.
- Сбои передачи.









