Что такое can-шина, для чего она нужна и как работает в автомобиле?
Содержание:
- How to log CAN bus data
- Что надо знать при поиске неисправностей систем, где применяется CAN-шина.
- What is a CAN frame?
- Как подключиться и сделать диагностику автомобиля
- Настройка CAN-модуля
- Диагностика неисправностей
- Принцип работы
- Description
- Обмен данными посредством шины CAN
- Краткие сведения о протоколе CAN
- CAN шина, как подключается автосигнализация к цифровой шине
- PT‐CAN, F‐CAN
- 1 О принципе работы сетевого интерфейса CAN-шина
- Принцип работы
- National Instruments CAN Tools
How to log CAN bus data
As mentioned, two CAN fields are important for CAN logging: The CAN ID and the
Data.
To record CAN data you need a CAN logger. This
lets you log timestamped CAN data to an SD card. In some cases, you need a CAN interface to stream
data to a PC — e.g. for car
hacking.
Connecting to the CAN bus
This first step is to connect your CAN logger to your CAN bus. Typically this involves using an adapter
cable:
-
Cars: In most cars, you simply use an OBD2 adapter to connect. In
most cars, this will let you log raw CAN data, as well as perform requests to log OBD2 or UDS
(Unified Diagnostic Services) data -
Heavy duty vehicles: To log
J1939 data from trucks, excavators, tractors etc you can typically connect to the J1939 CAN bus
via a standard J1939
connector cable (deutsch 9-pin) -
Maritime: Most ships/boats use the NMEA 2000 protocol and
enable connection via an M12 adapter to log marine data -
CANopen: For CANopen
logging, you can often directly use the CiA 303-1 DB9 connector (i.e. the default connector for
our CAN loggers), optionally
with a CAN bus extension
cable -
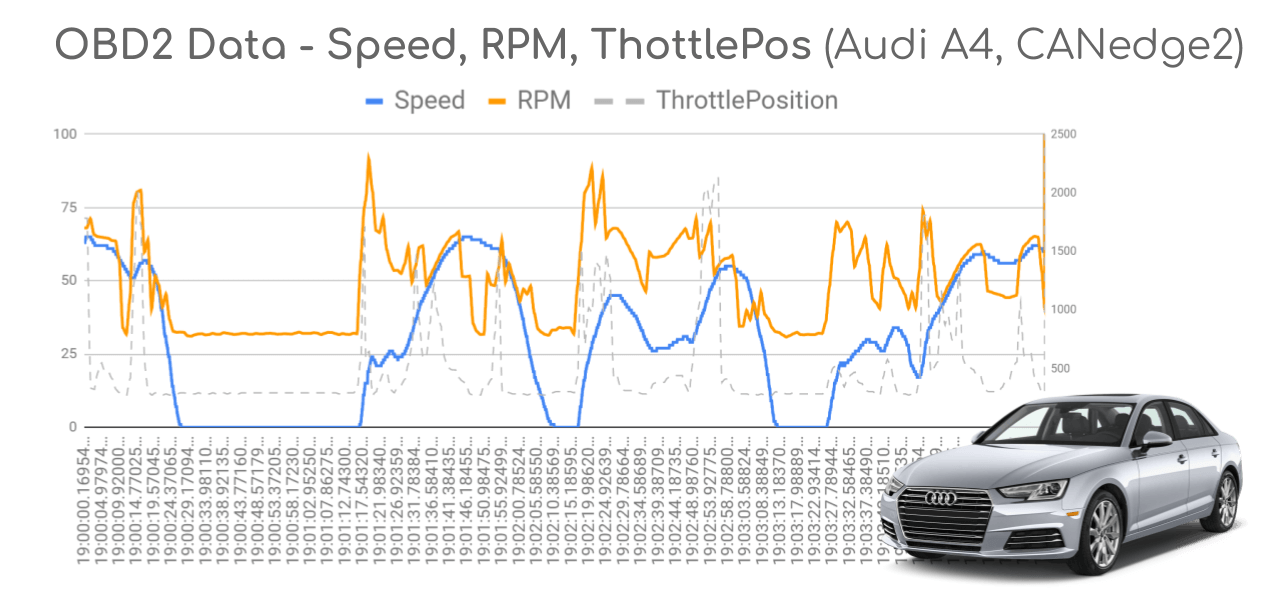
Contactless: If no connector is available, a typical solution is to use a contactless CAN
reader — e.g. the CANCrocodile.
This lets you log data directly from the raw CAN twisted wiring
harness, without direct connection to the CAN bus (often useful for warranty purposes) -
Other: In practice, countless other connectors are used and often you’ll need to create
a custom CAN bus adapter — here a generic open-wire
adapter is useful
When you’ve identified the right connector and verified the pin-out, you can connect your CAN logger to
start recording data. For the CANedge/CLX000, the CAN baud rate is auto-detected and the device will start
logging raw CAN data immediately.
Example: Raw CAN sample data (J1939)
You can optionally download raw OBD2 and J1939 samples from the CANedge2 in our intro docs. You
can e.g. load this data in the free CAN bus decoder software tools.
Data from the CANedge is recorded in the popular binary format, MF4, but can be
converted to any file format via our simple MF4 converters (e.g. to CSV,
ASC, TRC, …).
Below is a CSV example of raw CAN frames logged from a heavy-duty truck using the J1939 protocol. Notice
that the CAN IDs and data bytes are in hexadecimal format:
Example: CANedge CAN logger
The CANedge1 lets you easily
record data from any CAN bus to an 8-32 GB SD card. Simply connect it to e.g. a car or truck to start logging —
and decode the data via free
software/APIs.
Further, the CANedge2
adds WiFi, letting you auto-transfer data to your own server — and update devices over-the-air.
learn about the
CANedge
Что надо знать при поиске неисправностей систем, где применяется CAN-шина.
Основные неисправности шины можно разделить на два типа: механические и сбои связанные с электронной частью. Если неисправность связана с электроникой, то её можно найти только при наличие соответствующего оборудования или осциллографа. К механическим неисправностям можно отнести обрыв одного или обоих проводов, а так же нагрузочного сопротивления, замыкание на массу или между собой проводов шины. При проверке необходимо проверить сопротивление между проводами витой пары. Дело в том, что все оборудование имеет своё нагрузочного сопротивление, кроме того провода шины между собой так же соединяются нагрузочным сопротивлением. При этом надо учитывать, что шины системы комфорт находятся постоянно под напряжением, и при проверке необходимо снять клемму с аккумулятора. Сопротивление CAN-шины системы управления двигателем составляет примерно 50 – 70 Ом., а шина системы комфорт, информационно-командной систем может сильно отличаться в зависимости от подключённого оборудования и составлять примерно 2 – 4 кОм.
admin16/02/2016
Комментарий
Имя *
Сайт
Этот сайт использует Akismet для борьбы со спамом. Узнайте как обрабатываются ваши данные комментариев.
« Электронная панель приборов
Модуль зажигания »
Метки
Ваз, неисправности ВАЗ Датчики Зажигание Инжектор Приборы Стартер Схемы Электрокары Электроснабжение ваз 2110 газель газель бизнес регистраторы ремонт автомобиля
Свежие записи
- Устройство и принцип работы парктроника
- Многофункциональное устройство Roadgid X7 Gibrid GT
- Неисправность системы зажигания ГАЗ
- Электрический Xiaomi Mi Mijia M365
- Дополнительное оборудование автомобиля (установка)
Архивы
Архивы Выберите месяц Август 2019 Июль 2019 Декабрь 2017 Август 2017 Июль 2017 Июнь 2017 Май 2017 Апрель 2017 Март 2017 Декабрь 2016 Ноябрь 2016 Октябрь 2016 Сентябрь 2016 Август 2016 Июль 2016 Июнь 2016 Май 2016 Апрель 2016 Март 2016 Февраль 2016 Ноябрь 2015 Октябрь 2015 Август 2015 Июль 2015 Июнь 2015 Май 2015 Апрель 2015 Март 2015 Февраль 2015 Январь 2015 Декабрь 2014 Ноябрь 2014 Октябрь 2014 Сентябрь 2014 Август 2014 Июль 2014 Июнь 2014 Май 2014 Апрель 2014 Февраль 2014 Январь 2014 Декабрь 2013 Ноябрь 2013 Октябрь 2013 Август 2013 Июнь 2013 Май 2013 Март 2013 Февраль 2013 Январь 2013 Ноябрь 2012 Октябрь 2012 Сентябрь 2012 Август 2012 Июль 2012 Июнь 2012 Май 2012 Апрель 2012 Март 2012 Февраль 2012 Январь 2012 Декабрь 2011 Ноябрь 2011 Октябрь 2011 Сентябрь 2011 Август 2011 Июль 2011 Июнь 2011 Май 2011 Апрель 2011
Рубрики
- Аккумуляторная батарея
- Видео
- Генератор
- Датчики
- Диагностика
- Зажигание
- Новости
- Оборудование
- Приборы
- Ремонт
- Свечи зажигания
- Стартер
- Схемы
- Устройства
- Электрокары
- Электроснабжение
What is a CAN frame?
Communication over the CAN bus is done via CAN frames.
Below is a standard CAN frame with 11 bits identifier (CAN 2.0A), which is the type used in most cars. The extended
29-bit identifier frame (CAN 2.0B) is identical except the longer ID. It is e.g. used in the J1939 protocol for
heavy-duty vehicles.
Note that the CAN ID and Data are highlighted — these are important when recording CAN bus data, as we’ll see below.
The 8 CAN bus protocol message fields
- SOF: The Start of Frame is a ‘dominant 0’ to tell the other nodes that a CAN node intends to
talk - ID: The ID is the frame identifier — lower values have higher priority
- RTR: The Remote Transmission Request indicates whether a node sends data or requests
dedicated data from another node - Control: The Control contains the Identifier Extension Bit (IDE) which is a ‘dominant 0’ for
11-bit. It also contains the 4 bit Data Length Code (DLC) that specifies the length of the data bytes to be
transmitted (0 to 8 bytes) - Data: The Data contains the data bytes aka payload, which includes CAN signals that can be
extracted and decoded for information - CRC: The Cyclic Redundancy Check is used to ensure data integrity
- ACK: The ACK slot indicates if the node has acknowledged and received the data correctly
- EOF: The EOF marks the end of the CAN frame
CAN bus errors
The CAN frame has to satisfy a number of properties to be valid. If an erroneous CAN frame is transmitted, CAN
nodes will automatically detect this and take action accordingly. This is referred to as CAN bus error handling,
in which CAN nodes keep track of their own ‘CAN error counters’ and change state (active, passive, bus off)
depending on their counters. The ability of problematic CAN nodes to transmit data is thus gracefully reduced to
avoid further CAN errors and bus jamming. For details, see our intro to CAN bus error handling.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Настройка CAN-модуля
Рассмотрим процесс программирования модуля CAN-шины на примере популярной StarLine A93. Сам модуль устанавливается непосредственно на плату центрального блока, где предусмотрены специальные гнезда. На плате модуля есть USB-разъем, который в дальнейшем позволит обновлять прошивку.

Чтобы войти в режим программирования модуля, временно отключите от сигнализации разъемы питания и CAN-шины. Зажав кнопку Valet, возвращаем на место разъем питания и продолжаем удерживать кнопку, пока не отзвучат пять сигналов сирены.
Система подаст еще 4 сигнала, когда кнопка будет отпущена. Теперь перейдите в соответствующее меню настроек CAN-модуля однократным нажатием кнопки Valet. Затем вводим четырехзначный номер прошивки, быстро нажимая кнопку число раз, соответствующее очередной цифре номера. Например, для кода 1312 нужно нажать кнопку 1 раз, дождаться одиночного сигнала сирены, нажать ее три раза, после трехкратного сигнала нажать дважды, прослушать двойной «кряк» сирены, нажать кнопку еще два раза. После двойного сигнала с небольшой паузой система подаст еще два оповещения, если номер введен правильно, или четыре, если такой номер прошивки не найден.
Далее настраиваются функции модуля, для чего предусмотрено несколько уровней меню:
- Статусные функции: двукратное нажатие Valet
- Управляющие функции: трехкратное нажатие
- Дополнительные функции: четыре нажатия
Можно полностью сбросить CAN-модуль на заводские настройки пятикратным нажатием Valet – если Вы запутались в настройке, и проще начать ее «с нуля»
Меню статусных функций позволяет задать, какие именно информационные сигналы будут считываться с CAN-шины. Например, если Вы подсоединили аналоговый контроль концевиков дверей, считывание информации концевиков с CAN-шины отключите, иначе аналоговый вход не будет работать. Аналогично в меню управляющих функций можно определить, будет ли CAN-модуль управлять «аварийкой», закрытием и открытием центрального замка (причем закрытие и открытие настраиваются отдельно), замком багажника, автозапуском и так далее. В меню дополнительных функций настраивается функция Slave.
Как определить, какие функции нужно реализовать по аналогу, а какие доступны через CAN-шину? Достаточно выбрать на портале can.starline.ru модель автомобиля и тип модуля (2CAN, CAN+LIN и так далее), чтобы узнать номер прошивки, скачать последнюю версию и увидеть перечень функций, доступных в этой прошивке через CAN.
На Chevrolet Cruze до 2015 года с замком зажигания актуальная на момент написания статьи прошивка 1765 потребует включение управление аварийной сигнализацией «по аналогу», а вот управление штатным центральным замком уже можно смело настраивать по CAN-шине, не подключая дополнительные провода. Блокировку запуска придется подключать внешнюю, потому что заглушить мотор через диагностическую шину в этой прошивке тоже нельзя.
Ещё кое-что полезное для Вас:
- Старлайн Е91 — инструкция по эксплуатации и общий обзор
- Автосигнализация Старлай А-94
- Характеристики и обзор Старлайн А-63

В дальнейшем, когда прошивка обновится, появятся дополнительные функции, можно будет просто активировать их в настройках CAN-модуля, не отключая ранее выведенные в штатную проводку аналоговые каналы.
Диагностика неисправностей
Диагностика неисправностей автомобиля осуществляется путем подключения специализированного диагностического оборудования с необходимым программным обеспечением, так называемого анализатора шины CAN, либо с помощью осциллографа (с анализатором шины ЧН) и (цифрового) мультиметра).
Необходимо помнить, что блок CAN шины информационно-командной системы и системы КОМФОРТ постоянно находятся под напряжением, чего нельзя сказать о силовом агрегате. Для этого на время теста рекомендуется отключить аккумулятор, можно сходить с одной из 2-х клемм (более или менее).
Проверка функционирования шины CAN начинается с измерения сопротивления между проводами CAN.

В основном, все неисправности CAN-шины состоят из обрыва или замыкания линий, нагрузочных резисторов, нарушения логики работы или снижения уровня сигнала. В случае логического нарушения поиск и обнаружение проблемы возможно только с помощью анализатора CAN-шины.
Поскольку интерфейс CAN связан со многими системами автомобиля, при выходе из строя или неисправности одного из узлов он может работать некорректно. Их наличие повлияет на работу основных агрегатов.
Признаки и причины
О возникновении неисправностей могут сообщать следующие «симптомы»:
- на приборной панели ни с того ни с сего загорелось одновременно несколько значков: подушек безопасности, рулевого управления, давления в системе смазки и т.д.;
- загорелся индикатор Check Engine;
- на панели управления нет информации о температуре силового агрегата, уровне топлива в баке, скорости и т.д.

Причины сбоев в работе CAN интерфейса:
- обрыв проводки в одной из систем или повреждение линий электропередач;
- короткое замыкание в работе агрегатов на аккумулятор или массу;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего прерывается передача сигналов между системами;
- разрядка автомобильного аккумулятора или падение значения напряжения в электросети, что связано с неисправностью генераторной установки;
- отключение систем CAN-high или CAN-low;
- появление сбоев в работе катушки зажигания.
Канал «КВ Автосервис» рассказал подробнее о провалах цифрового интерфейса и тестах с компьютером».
Диагностика
Процесс проверки:
Диагностика начинается с поиска витой пары проводника шины CAN. Кабель имеет черную или серо-оранжевую изоляцию. Первый уровень является доминирующим, а второй – второстепенным.
Для определения причины проблемы понадобится тестер, рекомендуется использование мультиметра.
- С помощью мультиметра проверяется значение напряжения на контактных элементах. При выполнении задания зажигание должно быть включено. Процедура проверки покажет напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Зажигание выключено. Проводник с минусовым контактом отсоединяется от аккумулятора, зажим необходимо предварительно ослабить гаечным ключом.

Измеряется параметр сопротивления между проводниками. Вы можете узнать замыкание контактов, если это значение станет равным нулю. Когда диагностика показала, что сопротивление бесконечно, значит, в линии питания есть обрыв. Проблема может быть непосредственно в контакте. Требуется более детально проверить разъем и все кабели.
На практике короткое замыкание обычно происходит из-за неисправности в устройствах управления. Чтобы найти неисправный модуль, отключите питание каждого блока по очереди и проверьте значение сопротивления.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Description
Driver API for CAN Bus Peripheral (Driver_CAN.h)
The Controller Area Network Interface Bus (CAN) implements a multi-master serial bus for connecting microcontrollers and devices, also known as nodes, to communicate with each other in applications without a host computer. CAN is a message-based protocol, designed originally for automotive applications, but meanwhile used also in many other surroundings. The complexity of the node can range from a simple I/O device up to an embedded computer with a CAN interface and sophisticated software. The node may also be a gateway allowing a standard computer to communicate over a USB or Ethernet port to the devices on a CAN network. Devices are connected to the bus through a host processor, a CAN controller, and a CAN transceiver.
The CAN Driver API allows to implement CAN Interfaces that conform to the CAN specifications available from BOSCH:
- CAN 2.0B: CAN Specification 2.0B (released Sep. 1991) which is now superseded by ISO 11898-1.
- CAN FD: CAN with Flexible Data Rate introduced in 2012 (released April 17th, 2012).
Wikipedia offers more information about the CAN Bus.
CAN 2.0B** Every CAN CMSIS-Driver supports the CAN 2.0B standard
CAN 2.0B supports:
- message can contain up to 8 data bytes
- bitrates of up to 1Mbits/s
- requests
CAN FD
Support for CAN FD depends on the hardware. A CMSIS-Driver that supports CAN FD has the capability data field fd_mode = 1, which can be retrieved with the function .
CAN FD supports:
- message can contain up to 64 data bytes
- faster data transfers with faster bitrate used during the data phase
CAN FD does not support requests.
Block Diagram
The CAN Driver API defines a CAN interface for middleware components. The CAN Driver supports multiple nodes, which are able to send and receive messages, but not simultaneously.

CAN Node Schematic
Обмен данными посредством шины CAN
- Подробности
- Просмотров: 6977

Применяемая на автомобилях система CAN позволяет установить связь между отдельнымиэлектронными блоками управления. При эксплуатации автомобиля и при диагностикеего агрегатов эта система предоставляет возможность использования новых функций,которые не могут быть возложены на отдельно действующие блоки управления.Общие сведения по теме «Шина данных CAN» были впервые приведены в Программесамообучения 186; в настоящей Программе рассказывается об основных функциях системыCAN в ее современном состоянии.
Для чего служит система шин данных?Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронныеблоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса.Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть,связывающая блоки управления). Применение системы CAN на автомобиле дает следующиепреимущества:
•Обмен данными между блоками управления производится на унифицированной базе.Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.•Независимо действующие системы, например, система курсовой стабилизации ESP, могут бытьреализованы с меньшими затратами.•Упрощается подключение дополнительного оборудования.•Шина данных CAN является открытой системой, к которой могут быть подключены как медныепровода, так и стекловолоконные проводники.•Диагностика электронных блоков управления производится посредством кабеля «К».Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производитсячерез шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). Вданном случае речь идет о так называемом виртуальном кабеле «К». В будущемнеобходимость в кабеле «К» должна отпасть.•Можно проводить одновременную диагностику нескольких блоков управления, входящих всистему.
От центрального блока управления к децентрализованной сети с несколькими блоками управления

Автомобиль с центральным блоком управления

Автомобиль с тремя блоками управления

Автомобиль с тремя блоками управления, объединенными в сеть посредством системы шин данных

К системе CAN параллельно подключены многочисленные компоненты.При проектировании системы учитываются следующие требования:•Обеспечение максимальной надежности: внутренние и наружные помехи должны бытьобязательно распознаны.•Высокая живучесть: при выходе из строя одного из блоков управления система должнапродолжать функционировать, обеспечивая обмен данными между ее работоспособнымикомпонентами.•Высокая плотность потока данных: все блоки управления должны в каждый момент временирасполагать одинаковой информацией и получать одинаковые данные; при повреждении системывсе блоки управления должны получать информацию о ее неисправности.•Высокая скорость передачи данных: обмен данными между подключенными к сети компонентамидолжен производиться возможно быстрей, чтобы обеспечить требования передачи в реальномвремени.
Сигналы передаются шиной CAN в цифровом виде; в настоящее время для их передачи используютсямедные провода. При этом надежно обеспечивается скорость передачи данных до 1000 кбит/с(1 Мбит/с).

Вперёд >
Краткие сведения о протоколе CAN
CAN (Controller Area Network – сеть контролеров) представляет собой протокол (стандарт) последовательной связи, разработанный для промышленных и автомобильных приложений. Это ориентированный на обмен сообщениями протокол, используемый для связи между множеством (несколькими) устройств. Когда различные CAN устройства соединены между собой как показано на следующем рисунке, они формируют сеть, которая работает наподобие центральной нервной системы человека и позволяет любому устройству общаться с любым другим устройством в этой сети.

CAN-сеть состоит из двух проводников (CAN High и CAN Low) и обеспечивает двунаправленную передачу данных. На практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары. Передача ведется кадрами, которые могут принимать все узлы сети. Для доступа к такой шине выпускаются специализированные микросхемы (модули) – драйверы CAN-шины.
Обычно скорость передачи по CAN-шине варьируется от 50 Кбит/с до 1 Мбит/с, а дальность связи лежит в диапазоне от 40 метров (на скорости 1 Мбит/с) до 1000 метров (на скорости 50 Кбит/с).
Формат CAN сообщений
В CAN-сети данные передаются в виде сообщений определенного формата. Этот формат состоит из большого числа сегментов, но двумя основными сегментами является идентификатор (identifier) и данные (data), которые и позволяют передавать и принимать сообщения по CAN-шине.
Идентификатор (Identifier) – также известен под именами CAN ID и PGN (Parameter Group Number). Он используется для идентификации CAN устройств в CAN-сети. Длина идентификатора составляет 11 или 29 бит в зависимости от того какой тип протокола CAN используется:
- Standard (стандартный) CAN: 0-2047 (11-bit);
- Extended (расширенный) CAN: 0-229-1 (29-bit).
Data – это данные, которые необходимо передать от одного устройства другому. Длина данных может составлять от 0 до 8 байт.
Data Length Code (DLC) (длина поля данных): может принимать значения от 0 до 8 в зависимости от количества байт для передачи.
Проводники, используемые в CAN
CAN протокол работает по двум проводникам, именуемыми CAN_H и CAN_L, для передачи и приема информации. Оба проводника работают как дифференциальная линия, что означает что CAN сигнал (0 или 1) представляет собой разность потенциалов между CAN_L и CAN_H. Если эта разность положительна и больше определенного минимального уровня напряжения, то это 1, а если эта разность отрицательна – то это 0.
Обычно в протоколе CAN используется кабель с витыми жилами. Как показано на выше приведенном рисунке, на обоих концах CAN-сети включается 120-омный резистор для обеспечения баланса в линии.
Сравнение CAN с SPI и I2C
На нашем сайте мы ранее уже рассматривали использование в платах Arduino протоколов SPI и I2C, поэтому давайте сравним данные протоколы с протоколом CAN.
| Параметр | SPI | I2C | CAN |
| Скорость | 3-10 Мбит/с | стандарт: 100 Кбит/с;
быстрый: 400 Кбит/с; быстрый: 3,4 Мбит/с; |
10 Кбит/с — 1 Мбит/с (зависит от длины используемых проводов) |
| Тип | синхронный | синхронный | асинхронный |
| Число проводов | 3+ (MISO, MOSI, SCK, SS1, SS2…SS(n)) | ||
| Дуплекс | полный дуплекс | полудуплекс | полудуплекс |
По скорости стандарт CAN не в лидерах, но его главным «козырем» является высокая надежность связи.
Применения CAN протокола
- В связи с чрезвычайно высокой надежностью и устойчивостью CAN протокола он широко применяется в автомобилях, промышленных механизмах, сельском хозяйстве, медицинском оборудовании и т.д.
- В связи с небольшим количеством используемых проводников CAN протокол исключительно удобен для применения в автомобилях.
- Устройства на основе CAN протокола отличаются низкой стоимостью.
- В CAN-сеть (шину) легко добавлять и удалять новые устройства.
Использование протокола CAN в Arduino
Поскольку платы Arduino не имеют в своем составе встроенного CAN порта, то для реализации связи между ними по данному протоколу мы будем использовать внешние CAN модули MCP2515. Эти модули подключаются к плате Arduino по интерфейсу SPI.
CAN шина, как подключается автосигнализация к цифровой шине
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно. Устал платить за штрафы? Выход есть!
- Абсолютно легально (статья 12.2);
- Скрывает от фото-видеофиксации;
- Подходит для всех автомобилей;
- Работает через разъем прикуривателя;
- Не вызывает помех в радиоприемнике и сотовых телефонах.
Узнать подробности
PT‐CAN, F‐CAN
Для предотвращения отражения сигнала два абонента шины CAN (с максимальным удалением в сети PT-CAN) нагружаются сопротивлением 120 Ом. Оба нагрузочных сопротивления включаются параллельно и образуют эквивалентное сопротивление 60 Ом. При отключенном напряжении питания это эквивалентное сопротивление можно измерить между линиями передачи данных. Кроме этого, можно по отдельности измерить отдельные сопротивления.
Указания по измерению с сопротивлением 60 Ом: Отсоединить от шины легкодоступный ЭБУ. Измерить сопротивление на разъеме между проводами CAN низкого и высокого уровней.
1 О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
 Кан-шина в автомобиле
Кан-шина в автомобиле
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
Принцип работы
Принцип работы, по которому работает анализатор шины CAN, заключается в том, что ему необходимо быстро обработать полученную информацию и вернуть ее в виде сигнала для конкретной системы. В каждом отдельном случае скорость передачи данных для систем автомобиля разная.

Параметры скорости
Основные скоростные параметры выглядят так:
- суммарная скорость передачи потоков данных по цифровой шине – 1 Мбит/с;
- скорость передачи обрабатываемой информации между блоками управления автомобиля — 500 кб/с;
- скорость, с которой система «Комфорт» получает информацию, составляет 100 кбит/с.
Особенности передачи данных
Если автосигнализация подключена к цифровой шине, информация будет поступать максимально быстро, а команды, подаваемые человеком с помощью брелока, будут выполняться точно и вовремя. Системный анализатор работает без перебоев и поэтому работа всех систем машины всегда будет в исправном состоянии.
С появлением CAN-шины и началом ее использования схема автомобильной электропроводки освободилась от определенного количества проводников, обеспечивавших связь контроллера управления между диагностическим разъемом, двигателем, мультимедиа (системы навигации с операционной системой Android) , автомобильная система защиты и т д., используя протокол KWP 2000.
Цифровая шина представляет собой полную сеть контроллеров, которые объединены в компактное устройство и могут быстро получать или передавать информацию, запускать или выключать определенные системы. Последовательный режим передачи данных делает работу системы более плавной и корректной. Шина CAN является механизмом, который имеет тип доступа Collision Resolution и этот факт необходимо учитывать при установке дополнительного оборудования.

Обычно проводка CAN-шины оранжевого цвета, и они отличаются друг от друга полосами разного цвета (CAN-High — черная, CAN-Low — оранжево-серая).
При обмене информацией между любым блоком управления и с помощью приемопередатчика сигналы приема и передачи информации усиливаются до необходимого уровня.

Каждый блок, подключенный к CAN-шине, имеет определенное входное сопротивление, вследствие чего формируется нагрузка CAN-модуля.
Нагрузка на центральную CAN-шину зависит от одновременного подключения и использования исполнительных механизмов и электронных блоков управления автомобиля и различных датчиков, например, сопротивление силового агрегата, подключенного к CAN-шине, составляет в среднем 68 Ом, информационно-командное Системы «КОМФОРТ-пакет» от 2,0 до 3,5 кОм. В момент деактивации всей системы деактивируется и нагрузочное сопротивление модулей, работающих через CAN-шину.

Распределение нагрузки по проводам
Блоки управления автомобильными системами помимо различных нагрузочных резисторов имеют еще и скорость передачи данных, что может быть препятствием при обработке импульсов разной природы.
Для решения технической проблемы разнородных импульсов для связи между шинами используется шлюзовой преобразователь.
Преобразователь — это так называемый межсетевой интерфейс, в автомобиле используется в блоке управления или как самостоятельный блок и т.д. Интерфейс преобразователя используется для ввода/вывода различной информации из диагностического разъема OBD, который подводится к диагностическому разъему через определенный кабель и соединяет центральный блок управления с разъемом OBD по шине CAN.

OBD — это универсальный диагностический разъем с множеством удобств и преимуществ для сканирования автомобиля на ошибки и диагностики.

Как показано на изображении, электронные блоки CAN-шины общаются в автомобиле через разные блоки, но блок питания CAN-шины, информационно-командная система и система Комфорт делают одно и то же, в зависимости от марки автомобиля и в своем составе, единицы могут различаться, но суть идеи остается неизменной.
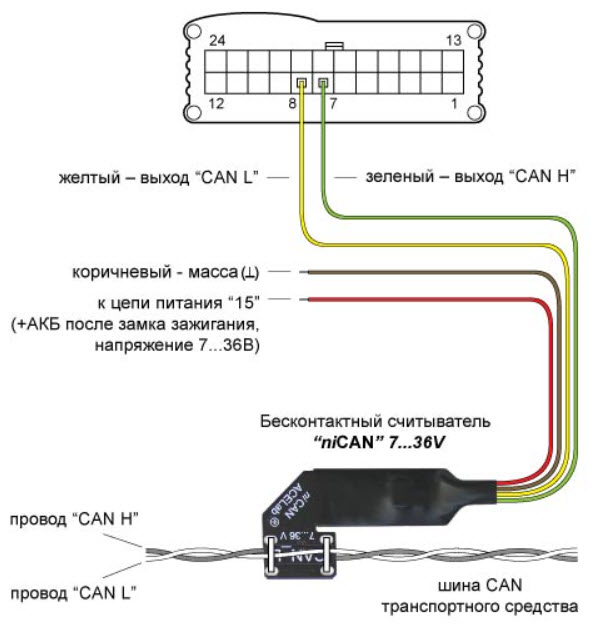
National Instruments CAN Tools
NI provides a variety of hardware and software tools for CAN application development. NI offers CAN interfaces for different platforms including PCI, PXI, USB, CompactRIO, and CompactDAQ (C Series). For PCI, PXI, and C Series, you can choose from high-speed/FD, low-speed/fault-tolerant, and single-wire physical layers. For PCI and PXI, National Instruments provides the industry’s first software-selectable CAN interface that contains a high-speed/FD, low-speed/fault-tolerant, and single-wire transceiver on each board, for each port, on a single device. This means you can simply select in your software which mode you want to use.
Figure 6. NI PCI-8513 Software-Selectable (XS) CAN Device
In addition, NI ships each of these devices with the appropriate driver software. NI CAN interface driver software is described below.
The National Instruments ECU Measurement and Calibration Toolkit extends the NI LabVIEW, NI LabWindows/CVI, and C/C++ development environments to support measurement and calibration applications for the design and validation of electronic control units (ECUs). The ECU Measurement and Calibration Toolkit provides high-level, easy-to-use functions based on the CAN Calibration Protocol (CCP) that ECU designers, testers, and engineers can use to build their own customized measurement and calibration applications.
The mark LabWindows is used under a license from Microsoft Corporation. Windows is a registered trademark of Microsoft Corporation in the United States and other countries.