В чем разница асинхронного и синхронного двигателей
Содержание:
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
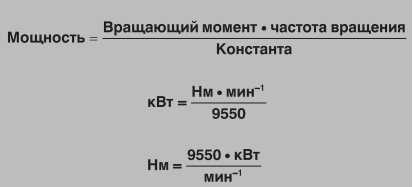
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
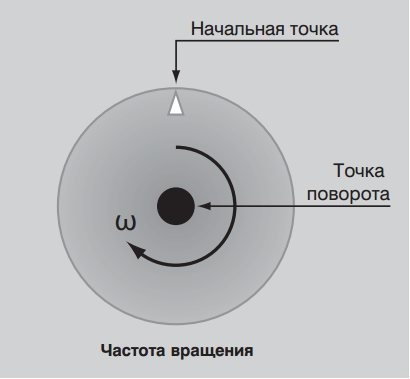
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
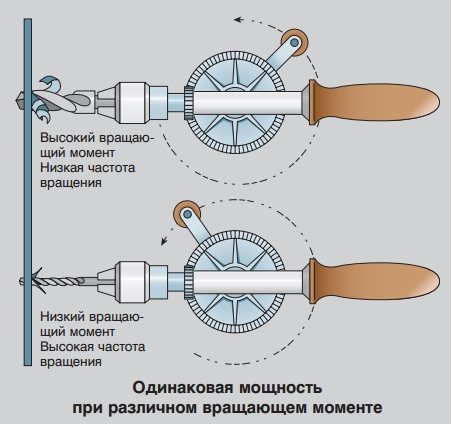
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
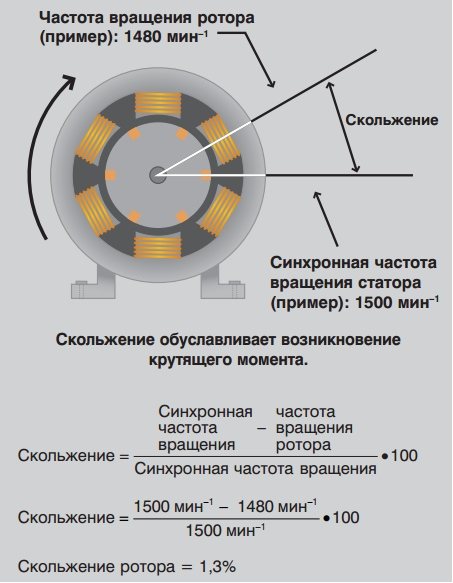
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
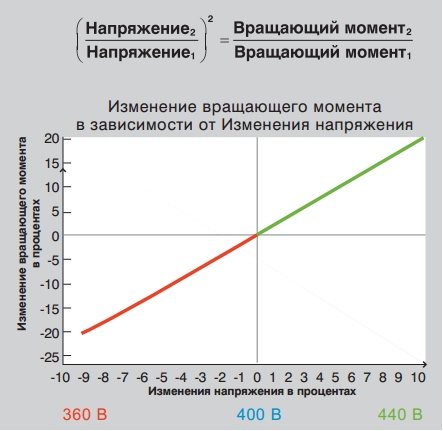
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
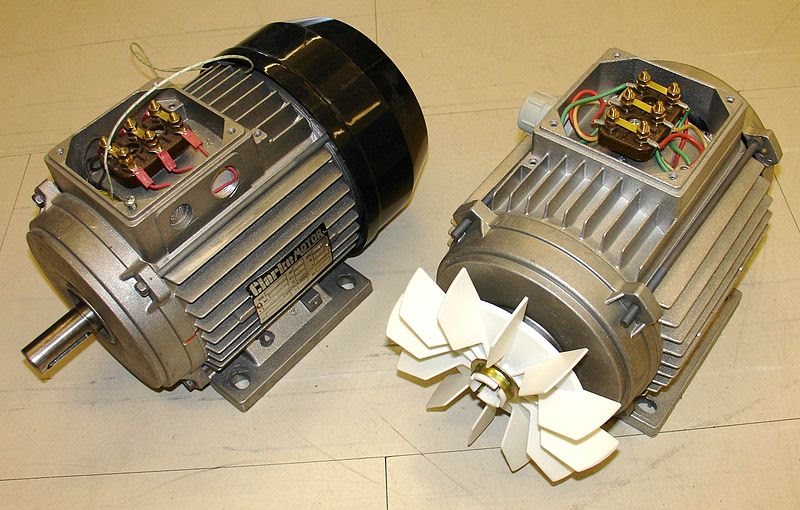
Синхронный и асинхронный генератор
Синхронный генератор конструктивно сложнее, например, у него на роторе находятся катушки индуктивности. Асинхронный генератор устроен гораздо проще — его ротор напоминает обычный маховик. Как следствие, среднестатистический асинхронный генератор лучше защищен от попадания влаги и грязи (говорят что он имеет закрытую конструкцию) и тут самое время вспомнить о классе защиты. Он обозначается двумя буквами (IP) и двумя цифрами. Первая цифра означает:
«2» защита от касания пальцами и от проникновения твердых посторонних частиц диаметром более 12 мм; «4» защита от касания инструментом пальцами или проволокой диаметром более 1 мм, защита от проникновения твердых посторонних частиц диаметром более 1 мм; «5» полная защита от касания вспомогательными средствами любого типа и от проникновения пыли. Вторая цифра: «3» защита от струй воды падающих под углом до 60 градусов от вертикали; «4» защита от струй воды падающих под любым углом;
Самый основной недостаток синхронного генератора — низкая степень защиты от внешних воздействий таких как: пыль, грязь, вода, т.к. синхронный генератор охлаждается «протягивая» через себя воздух, соответственно все что находится в воздухе может попадать в генератор. — для трёхфазных синхронных генераторов допустимый перекос фаз 33% — коэффициент нелинейных искажений 13-25% IP23 и 3-10% IP54 (в зависимости от производителя)
Синхронные генераторы, как правило, соответствуют классу IP 23, тогда как асинхронные IP 54. Впрочем, в последнее время практически у всех ведущих производителей появились инновационные синхронные агрегаты удовлетворяющие IP 54.
К сожалению асинхронники тоже не лишены недостатков. Способность «проглатывать» пусковые перегрузки ниже, чем у синхронных генераторов.
Асинхронный генератор (IP54) вообще не имеет обмоток на роторе. Для возбуждения ЭДС в его выходной цепи используют остаточную намагниченность якоря. Конструктивно такой альтернатор намного проще, надежнее и долговечнее. Кроме того, поскольку обмотки ротора охлаждать не нужно (их просто нет), корпус асинхронного генератора полностью закрыт, что позволяет исключить попадание пыли и влаги. Асинхронные генераторы не восприимчивы к коротким замыканиям, поэтому лучше подходят для питания сварочных аппаратов. — для трёхфазных асинхронных генераторов допустимый перекос фаз 60-70% — коэффициент нелинейных искажений 2-3%
Синхронные и асинхронные генераторы отличаются своими возможностями. Мнения специалистов тут расходятся (каждый естественно хвалит своё оборудование), но в среднем, всё выглядит примерно следующим образом: — синхронные альтернаторы легче переносят пусковые перегрузки и вырабатывают более чистый ток; — в силу простоты конструкции, асинхронные альтернаторы более устойчивы к короткому замыканию, поэтому лучше подходят для питания сварочных аппаратов.
Впрочем, в настоящее время существует множество способов улучшить выходные параметры мини электростанций. В частности, асинхронный генератор, оборудованный стартовым усилителем, способен справиться с пусковыми перегрузками, а качество выдаваемого электричества может быть повышено подключением AVR (автоматического регулятора напряжения). Кстати, на стабильность напряжения оказывает влияние и класс двигателя, а именно его способность поддерживать постоянные обороты (как правило, 3000) при изменениях нагрузки.
Синхронные генераторы обеспечивают поддержание напряжения в сети с высокой точностью (колебания в пределах 5%), поэтому позволяют подключать к ним аппаратуру чувствительную к перепадам напряжения, например, компьютеры, телевизоры и другие электронные устройства. Кроме того, такие генераторы без проблем справляются с энергоснабжением электроинструментов и электродвигателей, с реактивной нагрузкой до 65% от своего номинала.
Асинхронные генераторы менее точны: они поддерживают напряжение постоянным с точностью 10%, поэтому их нельзя применять для питания высокоточной аппаратуры (Hi-Fi техники и пр.). Подобные генераторы позволяют подключать к ним электроинструменты и электродвигатели с реактивной мощностью до 30% от номинала.
Наконец в качестве конструктивного исполнения более предпочтительны генераторы не оборудованные щетками (так называемые brush-less бесщеточные), так как они не требуют обслуживания и не создают помех.
Классификация электродвигателей
Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. Это объясняет название двигателя — синхронный.
В заключение отметим, что в отличие от асинхронного двигателя, у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения и сделать даже так, что ток будет опережать напряжение по фазе. В этом случае, подобно конденсаторным батареям, синхронная машина используется для повышения коэффициента мощности.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компрессоры, вентиляторы) ими легко управлять.
Отличить можно по кол-ву оборотов на табличке (если там явно не указан тип машины), у асинхронного не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Синхронные двигатели управляются также сложно как и асинхронные, т.к. требуют управления частотой подводимого напряжения. Они имеют абсолютно жесткую механическую характеристику, это означает, что как бы не менялась нагрузка на валу двигателя, он будет иметь одну и ту же частоту вращения. Естественно, нагрузка должна меняться в разумных пределах, есть значение критического момента нагрузки, при котором двигатель «выпадает» из синхронного режима, что чревато его поломкой. К основным недостаткам относится то, что обмотку возбуждения необходимо питать постоянным током, также наличие скользящего контакта «щетка-контактное кольцо», сложность пуска.
Чаще всего синхронные машины используют в качестве генераторов, вообще подавляющее большинство генераторов — синхронные, начиная с тех, которые устанавливаютс на автомобилях, и заканчивая теми, которые стоят на АЭС. Из всех других они наиболее надежны, имеют наибольший КПД, проще других в обслуживании.
КПД машины не зависит от косинуса фи электрической машины. КПД зависит восновном только от потерь в обмотке (потери в меди), в магнитопроводе (потери в стали), механических потерь и дополнительных потерь. Также КПД машины зависит от ее нагрузки, при этом максимум (КПД) наблюдается в точке, когда потери в стали и в меди равны, как правило это наблюдается, когда нагрузка составляет 75-80% от номинальной мощности машины.
Учитывая особенности производства электрических машин имеем что с ростом мощности выпущенной машины, потери растут не пропорционально, поэтому мощные электрические машины могут иметь КПД достигающий 99%.
ЧТО ТАКОЕ АЛЬТЕРНАТОР
Когда–то давно, на заре своего возникновения, устройство для выработки электрического тока так и называлось – альтернатор. То есть, это устаревшее название генератора переменного тока. Позже его стали называть генератором, подразумевая под этим всю конструкцию: альтернатор и двигатель, размещенные на открытой раме или в корпусе.Альтернатор в отдельности – самая важная часть генератора, именно он выполняет главную функцию – преобразовывает механическую энергию вращения вала двигателя в электрическую энергию переменного тока. В нем есть два стандартных элемента: вращающийся ротор и статор — неподвижная часть генератора.
Для возбуждения электродвижущей силы на обмотках статора нужно создать переменное магнитное поле. Для этого все генераторы используют намагниченный ротор, который вращается. Это то, что у всех одинаково. А вот дальше начинаются различия. По конструктивным особенностям передачи магнитного поля на обмотки статора все электростанции можно разделить на асинхронные и синхронные:
- Синхронные альтернаторы имеют обмотки и на роторе. Синхронный альтернатор носит второе популярное название – щеточный.
- Асинхронные альтернаторы обмотки на роторе не имеют. В них передается остаточная намагниченность ротора, без контакта, поэтому надобность в щетках тоже отпадает. Поэтому асинхронный альтернатор называют бесщеточным.
Если совсем просто, то синхронный альтернатор по строению является более сложным, он обладает обмотками на роторе и угольными щетками. Асинхронный альтернатор более простой по своему строению, поэтому генераторы с ним стоят дешевле и, учитывая отзывы покупателей, являются менее надежными и выносливыми. Но это не значит, что асинхронный альтернатор заведомо хуже синхронного. Есть некоторые нюансы, которые практически уравновешивают все плюсы и минусы и одного и другого типа. Какой генератор выбрать, синхронный или асинхронный, зависит от того, где и как вы планируете его применять.
Типичный отзыв клиента:
Читать дальше
Синхронный и асинхронный генератор

Электричество есть везде. Уже настал тот день, когда с этим сложно спорить. Даже там, куда не дотянулась централизованная электросеть, вовсю используются дизельные и бензиновые генераторы, которые получили широкое распространение не так давно, несмотря на почти двухсотлетнюю историю. Сегодня ассортимент генераторов очень велик, и существует множество способов их классификации, один из которых – классификация по степени синхронизации.
Применительно к электрогенераторам, синхронизация – это совмещение частоты вращения ротора и магнитного поля статора. Соответственно, если частота их вращения совпадает, такой генератор будет называться синхронным, а если нет, то асинхронным.
Синхронный генератор
Как известно, в дизельном или бензиновом генераторе электрический ток образуется после прохождения вращающегося магнитного поля через обмотку. При этом в синхронном электрогенераторе ротор представляет собой постоянный магнит или электромагнит. После запуска генератора он создаёт вокруг себя слабое магнитное поле, которое с увеличением оборотов становится сильнее. В конце концов, число оборотов ротора и магнитного поля синхронизируются, что позволяет получить на выходе наиболее стабильный ток.
В отличие от асинхронного генератора, синхронный агрегат уязвим при перегрузках, поскольку превышение допустимой нагрузки может вызвать сильный скачок напряжения в обмотке ротора. С другой стороны, важным преимуществом синхронного генератора является его способность кратковременно выдавать ток мощностью в 3-4 раза выше номинального, что позволяет подключать к нему такие устройства, как насосы, компрессоры, холодильники и т.д. Иными словами, он предназначен для электроприборов с высокими стартовыми токами. Несмотря на свою уязвимость, стоимость синхронных генераторов выше, чем асинхронных устройств.
Асинхронный генератор
Асинхронный генератор работает в режиме торможения: ротор вращается в одном направлении со статором, но скорость его вращения изначально выше. При этом частота вращения магнитного поля всегда остаётся неизменной, а регулированию поддаётся лишь скорость вращения ротора. Такие генераторы малоуязвимы при коротком замыкании и хорошо защищены от внешних воздействий (пыли, низкой температуры, влаги и т.д.).
Недостатками асинхронного генератора можно назвать обязательное наличие конденсаторов и зависимость частоты выходного тока от стабильности работы дизельного или бензинового двигателя. При этом стоимость такого устройства ниже, чем синхронного, но применяется оно реже. Асинхронные генераторы рекомендуется использовать для подключения устройств, не требующих высокого стартового напряжения и устойчивых к его перепадам.
Униполярные и шаговые варианты
Однако есть такие конструкции электромоторов постоянного тока, в которых коллектора нет. Это униполярные электромоторы.
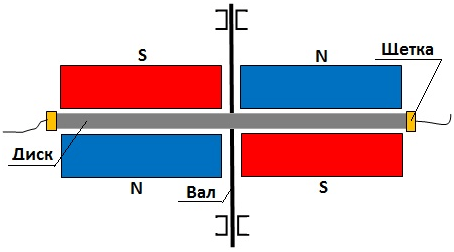
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов. Щётки расположенные диаметрально противоположно питают током диск – ротор. Под воздействием силы Лоренца диск вращается. Несмотря на привлекательную простоту конструкции, такой электромотор не имеет широкого практического использования, поскольку требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электромоторов со щётками из жидкого металла, которые развивают обороты немыслимые для иных конструкций двигателей.
Шаговый двигатель это ещё одна конструкция, работающая на постоянном токе.
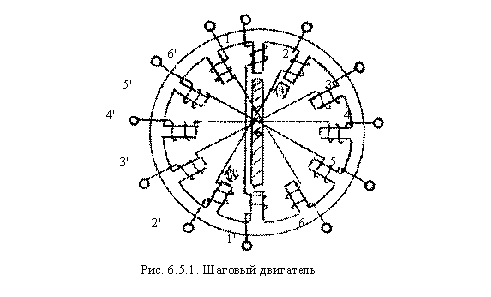
В целом этот двигатель подобен синхронному электромотору с ротором из постоянных магнитов. Отличие в том, что число обмоток здесь больше, и они управляются ключами, которые подают на каждую обмотку питающее напряжение. В результате ротор меняет своё положение, притягиваясь к подключенной обмотке. Число обмоток определяет минимальный угол поворота ротора, а коммутаторы – скорость вращения ротора. В шаговом двигателе ротор может вращаться почти как угодно, поскольку ключи связаны с электронной схемой управления.
Рассмотренные конструкции электромоторов являются базовыми. На их основе для решения определённых задач создано много специальных разновидностей электромоторов. Но это уже совсем другая история…
В быту, коммунальном хозяйстве, на любом производстве двигатели электрические являются неотъемлемой составляющей: насосы, кондиционеры, вентиляторы и пр
Поэтому важно знать типы наиболее часто встречающихся электродвигателей
Электродвигатель является машиной, которая преобразует в механическую энергию электрическую. При этом выделяется тепло, являющееся побочным эффектом.
Видео: Классфикация электродвигателей
Все электродвигатели разделить можно на две большие группы:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока.
Электродвигатели, питание которых осуществляется переменным током, называются двигателями переменного тока, которые имеют две разновидности:
-
Синхронные
– это те, у которых ротор и магнитное поле питающего напряжения вращаются синхронно. -
Асинхронные
. У них отличается частота вращения ротора от частоты, создаваемого питающим напряжением магнитного поля. Бывают они многофазными, а также одно-, двух- и трехфазными. - Электродвигатели шаговые отличаются тем, что имеют конечное число положений ротора. Фиксирование заданного положения ротора происходит за счет подачи питания на определенную обмотку. Путем снятия напряжения с одной обмотки и передачи его на другую осуществляется переход в другое положение.
К электродвигателям постоянного тока относят те, которые питаются постоянным током. Они, в зависимости от того, имею или нет щёточно-коллекторный узел, подразделяются на:

Коллекторные также, в зависимости от типа возбуждения, бывают нескольких видов:
- С возбуждением постоянными магнитами.
- С параллельным соединением обмоток соединения и якоря.
- С последовательным соединением якоря и обмоток.
- Со смешанным их соединением.
Электродвигатель постоянного тока в разрезе. Коллектор со щетками – справа
Принцип работы устройства
Частями асинхронного двигателя являются статор и ротор. Если начать подавать электрический ток на кабели статора, то двигатель начнет работать. Внутри машины начинается индукция, то есть в двигателе индуцируется мощное электромагнитное поле. Например, в технике с постоянным электрическим током необходимо создавать электромагнитное поле в якоре с помощью щеток.
По закону Фарадея, в устройстве, которое обладает короткозамкнутой обмоткой, проходит наведенный электроток, потому что цепочка замыкается по методу короткого замыкания. Данный ток, как и напряжение в статоре, приводит к появлению магнитного поля. Ротор устройства становится магнитом в статоре, обладающим вращающимся электромагнитным полем.
Статор не двигается, и поле перемещается внутри машины с нормальной скоростью, а в роторе индуцируется электроток, что делает из него мощный магнит. Благодаря этому подвижный ротор начинает двигаться благодаря полю статора. Почему происходит асинхронное вращение, можно понять, зная, что в момент объединения магнитные поля пытаются компенсировать недостатки друг друга.
Процесс скольжения может проходить не только с небольшим опозданием, но и с опережением. В первом случае мотор превращает электроэнергию в механическую (например, станок начинает двигаться). А во втором происходит генераторная работа, то есть движение деталей устройства вырабатывает электричество.
Достоинства асинхронных генераторов
Асинхронные генераторы дешевле, проще в обслуживании, практически нечувствительны к короткому замыканию. Поскольку у них отсутствует щеточный узел, конструктивно они надежнее, чем синхронные. К тому же у них нет обмоток на роторе, а следовательно, их не нужно охлаждать (обмотки ротора синхронного генератора нуждаются в охлаждении).
Однако, несмотря на все эти плюсы, для организации автономного энергоснабжения асинхронные электростанции применяются очень редко. Все дело в том, что они не выдерживают кратковременные перегрузки, возникающие при подключении потребителей с высокими пусковыми токами
В результате, чтобы использовать асинхронный генератор для создания системы энергоснабжения, следует обращать пристальное внимание на его мощность: надо учитывать реактивную составляющую мощности и выбирать генератор, мощность которого соответствует не только суммарной номинальной мощности всех планируемых потребителей электроэнергии, но и кратковременной перегрузочной, возникающей при пуске приборов, которые обладают реактивной нагрузкой. Кроме того, асинхронные двигатели не слишком надежны при работе в экстремальных условиях, и стабильность напряжения на выходе у них хуже, чем у синхронных
Для борьбы с указанными недостатками современные модели оснащаются регуляторами напряжения и стартовыми усилителями. К сожалению, от этого добавляются не только плюсы, но и новые минусы: усложняется конструкция генератора и, как следствие, снижается надежность (чем проще — тем надежнее). А ведь именно простота и надежность являются главными преимуществами асинхронных генераторов.
С учетом всех плюсов и минусов для создания автономной системы энергоснабжения рекомендуется использовать синхронные генераторы, несмотря на их более высокую цену и относительную сложность обслуживания. В настоящее время выпускаются синхронные электростанции без щеточного узла. Такие модели являются самыми предпочтительными, поскольку, они проще в обслуживании и лишены других недостатков, связанных с наличием щеточного узла.







